For this undergraduate research project with the Living Mobility Group in MIT's Media Lab I designed and built a robotic arm to provide haptic feedback in virtual reality. The robotic arm incorporated two actuators that provide force feedback to give users the illusion that they are touching virtual reality objects. Through the use of SOLIDWORKS CAD modeling and mechanics calculations, I developed a lightweight aluminum robotic arm that is able to withstand the simulated forces of pulling a bow and arrow in virtual reality.

Wearable robotic arm to provide haptic feedback in virtual reality
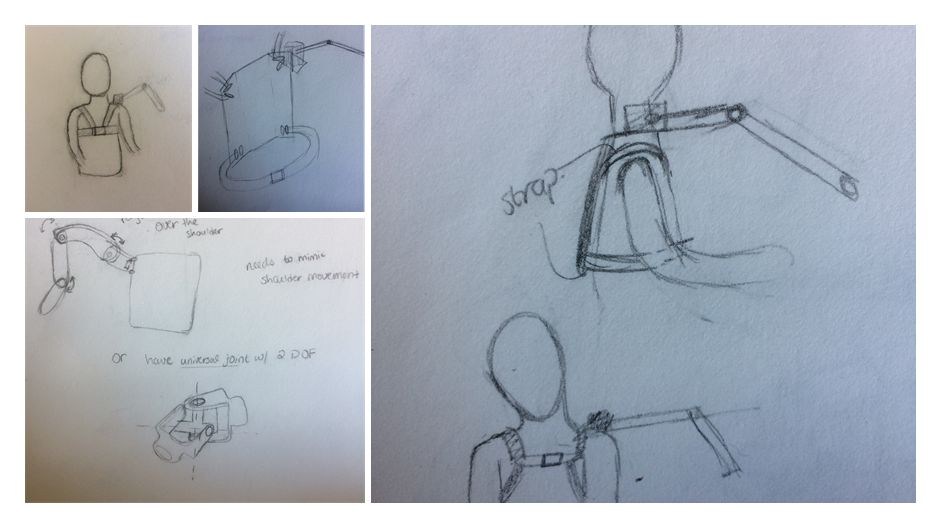
Sketches of methods to make a wearable arm
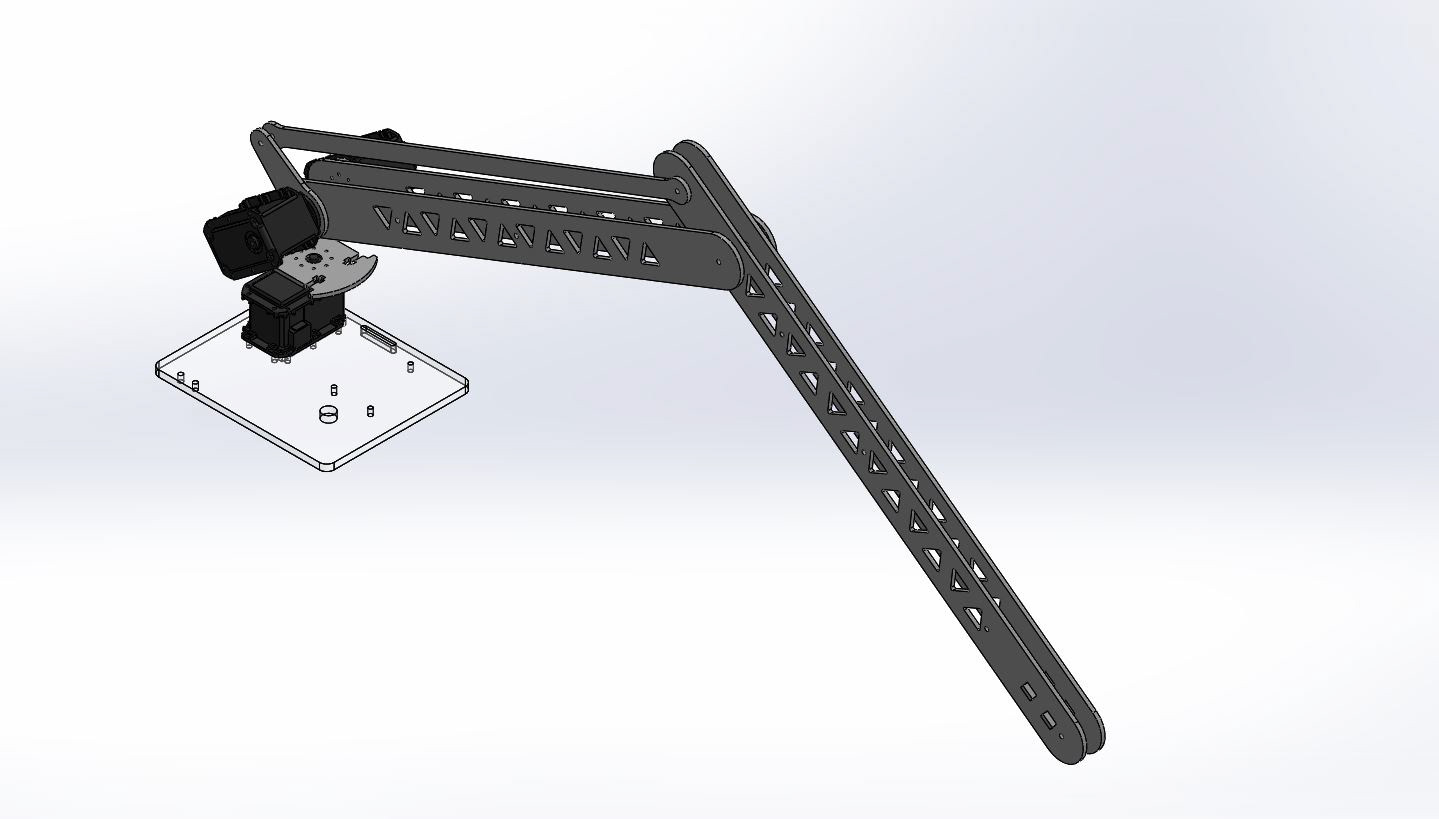
One of the prototypes, a robotic arm with all the motors mounted on the base, and a four bar linkage to control the lower arm movement. Although this makes the moving components of the arm lighter, it complicates the software side and we therefore did not pursue this design.
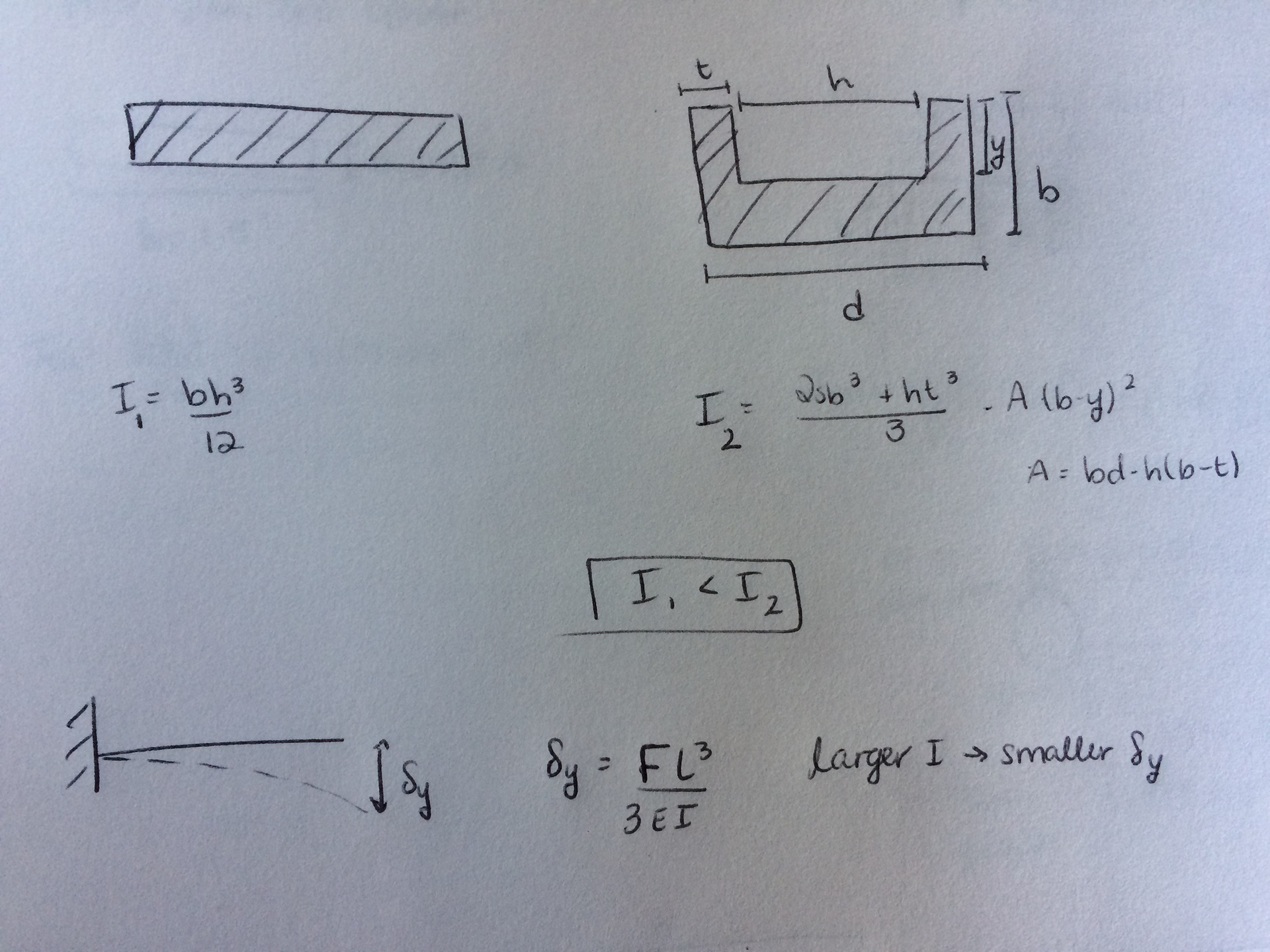
A c-shaped beam made from lightweight aluminum was used in order to increase the moment of inertia and thereby decrease the deflection of the robotic arm due to the exerted forces
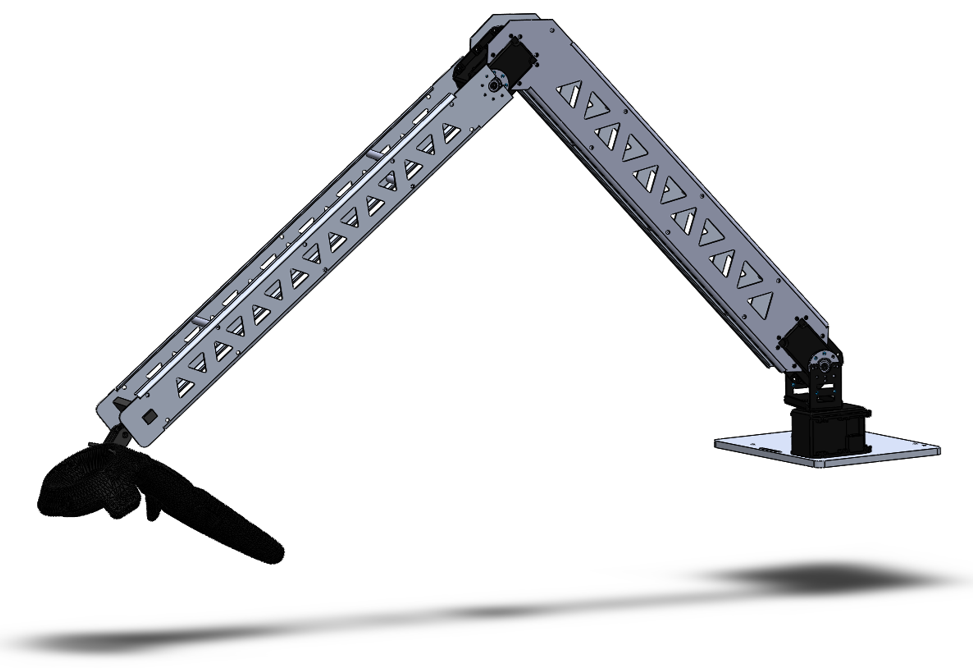
CAD of final robotic arm. This included three motors to allow full range of motion and a VR controller attached to the end effector to track motion
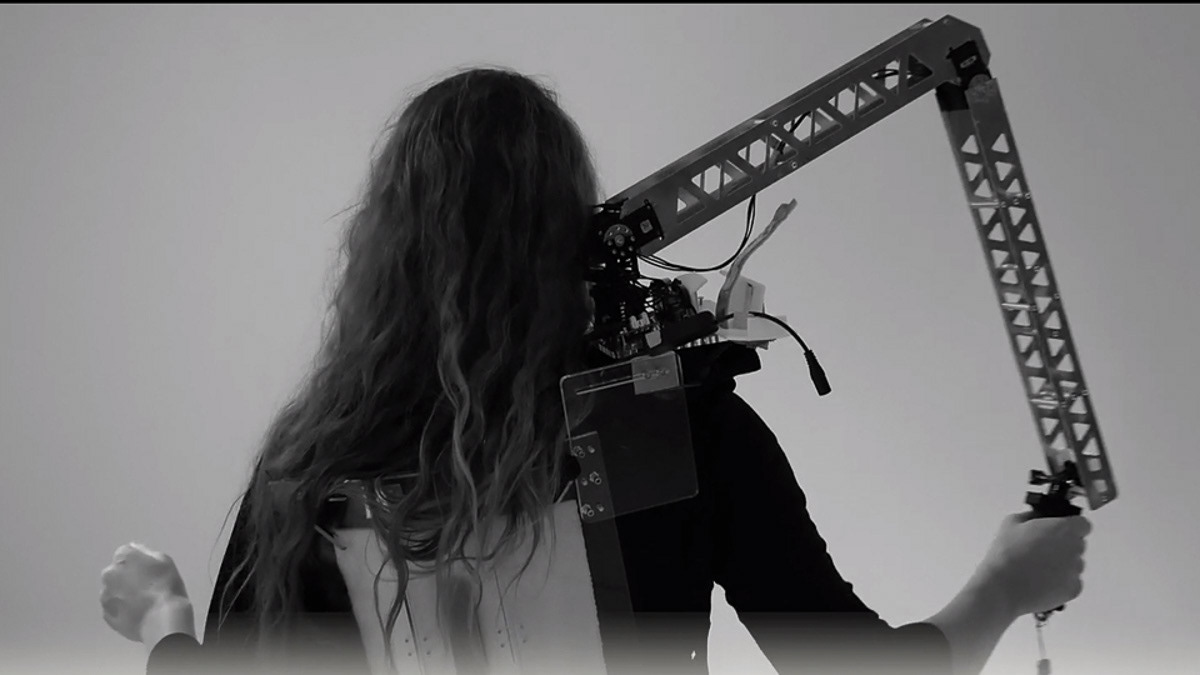
The robotic arm is attached to a wearable black plate, which is also used to mount a battery pack and other necessary electronics. The arm sits comfortably on the shoulder and can extend a full arms length

To attach an HTC Vive controller to the end effector, a GoPro hinge was fastened to a 3D printed coupler that was secured around the controller
